We will be dealing with two dimensional systems so often that it will be helpful for us to have a shorthand notation for quantities with both x and y coordinates. Since the x and y directions are perpendicular to each other, nothing that happens in the x direction has any effect on what happens in the y direction, and vise verse (at least until we talk about magnetism!). The x and y directions are mutually independent. This means that when we discuss the motion of an object in two dimensions, we need four independent equations instead of two, with eleven independent unknowns instead of six (x, x 0, v x, v x 0, a x , y, y 0, v y , v y 0, a y and t ):
and
The additional unknowns represent the doubling of the spatial degrees of freedom: from motion on a line (in the x direction only), we now have motion in a plane. Here, each of the x and y components of the initial velocity and the acceleration must be specified separately; hence the additional subscripts. Remember that in the above equations, the acceleration is still a constant; there are separate constant accelerations in the x and y directions.
The "vector" is a notation which enables us to capture the similarity of the above equations and write them as one. Here we define the vector "V":
The vector V is a pair of real numbers Vx and Vy, which are called the "x component" and "y component" of the vector. It indicates the direction and distance one would go by walking Vx in the x direction, and then walking Vy in the y direction (or vise versa; the order is unimportant):
Note that we will encounter many vectors which represent quantities with a direction in space but whose magnitude has nothing to do with distance.
The position vector is a shorthand for the coordinates of an object:
Likewise, an object which lives in two dimensions (ie., on the plane of a blackboard) also has a two dimensional velocity:
and a two dimensional acceleration:
In vector notation, the four equations for uniform accelerated motion become
and
X 0 and V 0 are the initial position and velocity vectors, respectively. Note that these equations are identical in form ("isomorphic") to the first two pairs of equations; each is really two equations in one. The x component of each equation is the first pair of the above four equations, and the y component of each equation is the second. Notice also that we have not lost any unknowns. Since each of the five vectors in these equations have two components, we still have eleven unknowns in four equations.
If we consider a cat jumping from a chair, we find that the components of the vectors necessary to compute its trajectory are
and
where we take the origin to be under the cat, we must specify the x and y components of the initial velocity separately, and we ignore air resistance so that there is no acceleration in the x direction. The vector equations thus obtained yield the following component equations:
and
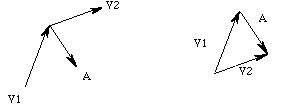
Because the vectors live on a plane, they have direction as well as magnitude. The direction of a position vector is the direction from the origin to the position of the object. The magnitude of a position vector is the distance from the origin to the object. Likewise, the direction of a velocity vector is the direction of its motion, and the direction of an acceleration vector is the direction of its acceleration. Note that the direction of the acceleration vector is independent of the direction of the velocity vector. When the acceleration vector points in a different direction from the velocity vector, it means that the object is changing direction (ie., from V1 to V2):
If we measure a vector, we can use right triangle trigonometry to find its components. For a triangle with acute angle "q", hypotenuse of length "h", and sides of length "a" and "o" adjacent and opposite to the angle q, respectively,
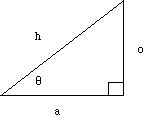
the sine and cosine of the angle are given by
and
Similarly, given the vector with length V and direction q from the horizontal:
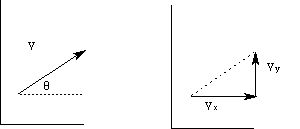
We find its x component as
and its y component as
Implicit in these equations is the fact that the original vector V is drawn along the hypotenuse of a right triangle. The right triangle was constructed by drawing a horizontal line from the origin of the vector and dropping a perpendicular from its other end to the horizontal line. The components of the vector (relative to the angle q) always correspond to the adjacent and opposite sides.
It is important to note that the connection of cosine to x component and sine to y component is not invariate. In the following drawing,
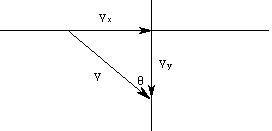
we have
and
because of the way the angle was labelled. Similarly, we can find the components of a vector V which are parallel and normal (perpendicular) to a given direction W:
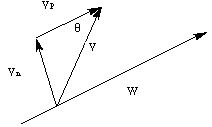
by
and
That is, we are not tied to the x and y axes when using vectors. Here we drew the triangle by raising a perpendicular (to W) from the origin of the vector, and then drawing a line (which is parallel to W) to the other end of the vector. We will have many occasions to find such parallel and normal components of vectors when we study skeletomuscular equilibrium. We will also have occasion to find the angle of a vector from the horizontal (or some other reference direction), given its components:
since
There are several operations on vectors which we will have need to perform:
Addition:
Subtraction:
Length:
We will also define a "unit vector" for a vector V:
which is a vector of length one pointing in the same direction as V. Note that the equation for the length of a vector is simply Pythagorus' celebrated theorem.
The abstraction of vectors to three dimensions is straight forward, but we will have little occasion to need them in this course.
The next section is about dynamics.
If you have stumbled on this page, and the equations look funny (or you just want to know where you are!), see the College Physics for Students of Biology and Chemistry home page.
©1996, Kenneth R. Koehler. All Rights Reserved. This document may be freely reproduced provided that this copyright notice is included.
Please send comments or suggestions to the author.